
百度AI市场

xMate七轴柔性协作机器人
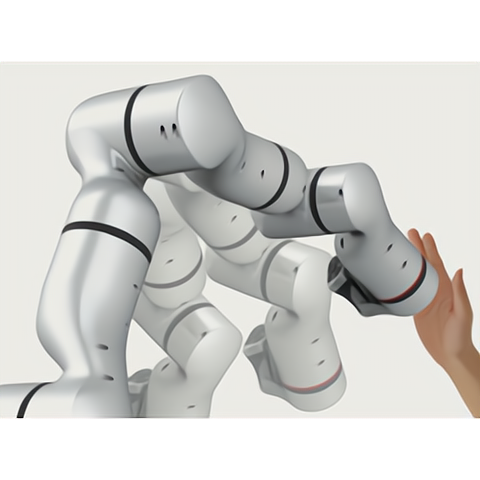
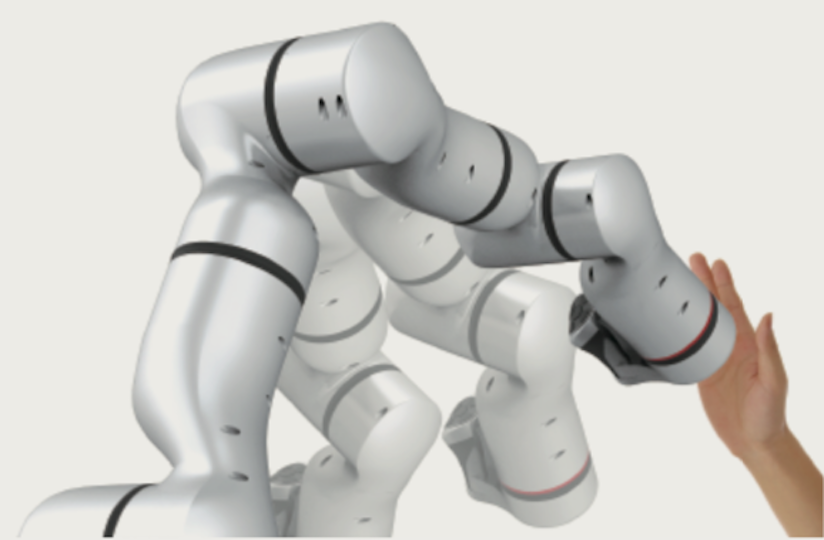
xMate采用7自由度冗余运动设计,机器人可以不同构型达到相同的末端位姿,零空间运动(Null-Space Motion)技术使得机器人能够在狭窄工作空间中灵活避障,提升机器人的有效工作范围。
新一代柔性协作机器人 xMate
工业技术进步是人类社会发展变革的推动力生产的自动化、智能化正在改变当今全球工业的生产效率工业机器人的诞生与进化——由简至精、由刚到柔正在不断缩短与人的距离珞石新一代柔性协作机器人——xMate 以高灵敏度力感知&高动态力控成为人类工业生产得力的合作伙伴,为柔性智造赋能。
灵动——7自由度设计,冗余运动控制,精准灵活
xMate采用7自由度冗余运动设计,机器人可以不同构型达到相同的末端位姿,零空间运动(Null-Space Motion)技术使得机器人能够在狭窄工作空间中灵活避障,提升机器人的有效工作范围。

灵敏——灵敏力感知,一指触停,极致安全
xMate每个关节配置高精度力矩传感器,使其具备“一指触停”的灵敏碰撞检测能力,配合虚拟墙、速度限制、力矩限制等完善的安全功能设计,使其可以消除机械围栏与人交互协作,从而降低生产环境改造成本,提升柔性生产部署能力。

灵智——全状态反馈,高动态力控,零力拖动
xMate采用全状态反馈的直接力控制技术,使其在兼顾位置控制高精度的同时具备高动态力控制与柔顺控制能力。xMate可以独立设置轴空间和笛卡尔空间各自由度的刚度,使其具备人手臂一样的柔顺能力,配合完善的力控搜索功能,能够胜任精密零部件装配、精细打磨等应用场景。基于直接力控制实现的零力拖动、主动柔顺性能,使xMate能够应用于辅助医疗、康复护理等领域。
灵巧——无控制柜设计,轻量化机身,容易部署
xMate采用无控制柜一体化设计,机械臂内集成主控制器、安全控制器和扩展接口模块,整个机器人系统总重仅20kg。配合高集成度模块化关节设计以及紧凑外形设计,使其可以部署在狭窄空间内,降低应用部署成本。无控制柜和轻量化设计,也令 xMate与AGV配合应用更方便。

灵便——拖动示教精准复现,零基础图形化操作
xMate跨平台的机器人操作软件,可以运行于笔记本、平板电脑等通用设备上,采用图形化交互式引导编程方式,xMate提供手动引导示教的Naviga- tor工具,配合“实用级”拖动功能,可以实现点位和连续轨迹的直接示教,拖动示教的精准复现,实现零基础使用机器人。xMate通过RL编程语言提供更全面的控制功能,同时提供RCI底层控制能力, 满足教育科研、自动化工艺研发等高端用户需求。

| 商品规格 | 数量/时长 | 含税价格 |
|---|---|---|
| 本体+控制系统 | 1件 | ¥250000 |




